tanuna¶
tanuna provides tools to work with dynamic systems. This currently includes
continuous- but not discrete-time systems
linear systems
time-independent systems
Single-Input Single-Output (SISO) and Multiple-Input Multiple-Output (MISO) systems
In the following, we will explain how to:
create systems
analyze systems
solve systems
combine systems
Diving In¶
Let’s start with some examples based on a continuous-time, second-order LTI SISO system:
import tanuna as dyn
import numpy as np
import matplotlib.pyplot as pl
w0 = 2 * np.pi * 10
zeta = 0.5
k = 1.
A = np.matrix([[0, w0], [-w0, -2*zeta*w0]])
B = np.matrix([0, k*w0]).T
C = np.matrix([k, 0.])
D = np.matrix([0.])
G = dyn.CT_LTI_System(A, B, C, D)
This creates the system G from state-space matrices A, B, C, D. The system provides some interesting information:
>>> G.stable
True
>>> G.poles
array([-31.41592654+54.41398093j, -31.41592654-54.41398093j])
>>> G.reachable
True
>>> # Reachability matrix:
... G.Wr
matrix([[ 0. , 3947.84176044],
[ 62.83185307, -3947.84176044]])
>>> G.observable
True
>>> # Observability matrix:
... G.Wo
matrix([[ 1. , 0. ],
[ 0. , 62.83185307]])
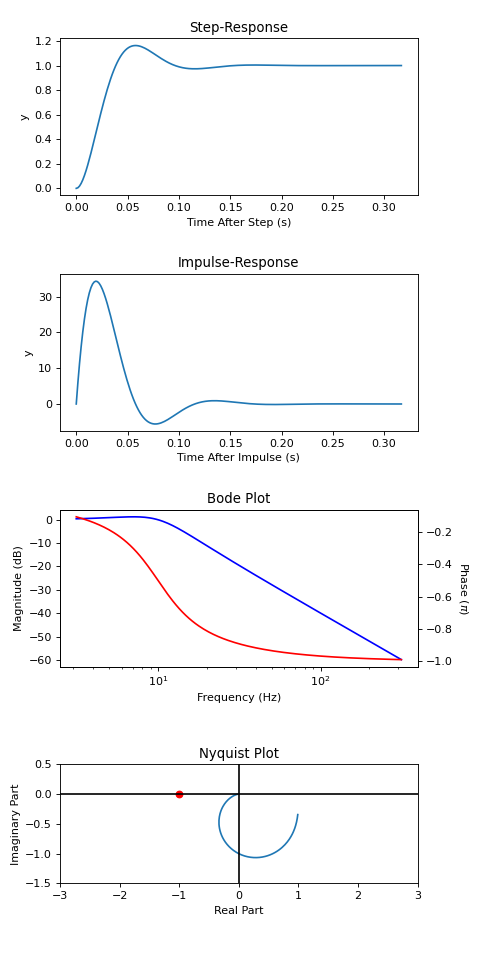
Furthermore, it calculates step- and impulse-responses, Bode- and Nyquist-plots:
# -*- coding: utf-8 -*-
import tanuna as dyn
import numpy as np
import matplotlib.pyplot as pl
w0 = 2 * np.pi * 10
zeta = 0.5
k = 1.
A = np.matrix([[0, w0], [-w0, -2*zeta*w0]])
B = np.matrix([0, k*w0]).T
C = np.matrix([k, 0.])
D = np.matrix([0.])
G = dyn.CT_LTI_System(A, B, C, D)
pl.figure(figsize=(6, 12))
# STEP RESPONSE
pl.subplot(4, 1, 1)
pl.title('Step-Response')
t, sr = G.stepResponse()
pl.plot(t, sr[:, 0, 0])
pl.xlabel('Time After Step (s)')
pl.ylabel('y')
# IMPULSE RESPONSE
pl.subplot(4, 1, 2)
pl.title('Impulse-Response')
t, ir = G.impulseResponse()
pl.plot(t, ir[:, 0, 0])
pl.xlabel('Time After Impulse (s)')
pl.ylabel('y')
# BODE PLOT
ax1 = pl.subplot(4, 1, 3)
ax1.set_title('Bode Plot')
f, Chi = G.freqResponse()
ax1.semilogx(f, 20 * np.log10(np.abs(Chi[:, 0, 0])), r'b-')
ax1.set_xlabel('Frequency (Hz)')
ax1.set_ylabel('Magnitude (dB)')
ax2 = ax1.twinx()
ax2.semilogx(f, np.angle(Chi[:, 0, 0]) / np.pi, r'r-')
ax2.set_ylabel('Phase ($\pi$)', va='bottom', rotation=270)
# NYQUIST PLOT
ax = pl.subplot(4, 1, 4)
pl.title('Nyquist Plot')
pl.plot(np.real(Chi[:, 0, 0]), np.imag(Chi[:, 0, 0]))
pl.plot([-1], [0], r'ro')
pl.xlim([-3., 3])
pl.ylim([-1.5, 0.5])
ax.set_aspect('equal')
pl.axhline(y=0, color='k')
pl.axvline(x=0, color='k')
pl.xlabel('Real Part')
pl.ylabel('Imaginary Part')
pl.subplots_adjust(top=0.96, bottom=0.06, right=0.87, hspace=0.5)
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
The duration of the trace and the density of samples is automatically determined for you based on the Eigenvalues of the system (but you can provide your own if you prefer).
System-algebra is supported: You can connect systems in series, in parallel (creating a MIMO system from 2 SISO systems for example), and in feedback configuration:
>>> # Connect G in series with G:
... H = G * G
>>> # Connect G in parallel with G:
... J = G + G
>>> # This is the same as 2 * G:
... G + G == 2 * G
True
>>> # Check number of inputs and outputs:
... (2 * G).shape
(1, 1)
>>> G.shape
(1, 1)
>>> H.shape
(1, 1)
- feedback_systems
Karl Johan Åström and Richard M. Murray, “Feedback Systems”, Princeton University Press, 2012